# CozIR-LP3
## 1. Cozir-LP2에서 추가된 기능
* 알람 기능
\- 사용자 알람 값을 설정하였을 경우 알람 값에 도달 하면 디지털 출력으로 사용자에게 알려줌
* 알람 UART Command
| Command | Description | Response |
| ------- | ----------- | -------- |
| V ##### | 알람 값 설정 | V ##### |
| v | 현재 알람 값 읽기 | v 15000 |
\- 알람 값은 센서 전원을 껐다 켜도 유지됨
\- 초기에는 알람 설정이 꺼져있음
* PWM 기능
\- 통신 프로토콜을 이용하여 Prescalar, Resolution, mode, pulses setting, pwm on/off 설정 가능
* PWM UART Command
| Command | Description | Response |
| ------- | ------------------------------------------------------------ | -------- |
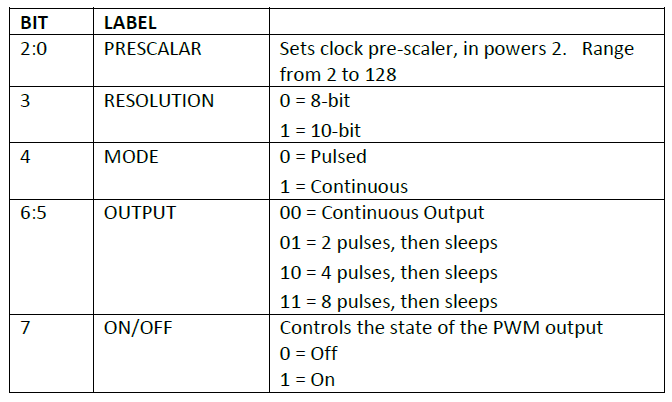
| J ### | PWM 설정( Prescalar, Resolution, mode, pulses setting, on/off) | J ### |
| j | 현재 PWM 값 읽기 | j |
* J ###\r\n Command
\- J ###\r\n에서 ### 은 Bit \[7:0] 까지 설정한 값이 들어감
* 센서 자기 진단 테스트
| Command | Description | Response |
| ------- | ------------ | -------- |
| i | 센서 자가 진단 테스트 | i ### |
Response: ### = 170 - Sensor error
\### = 85 - no Sensor error
## 2. 특징
* 최첨단 Solid-State LED 광학 기술 이용한 초 저전력 NDIR CO2 센서
* 디지털(UART) 및 I2C 출력
* 높은 CO2 측정 정확도
* 내장형 자동 영점 조정
* 30 ppm(일반) 정확도
## 3. 애플리케이션
* 난방, 환기 및 공기 조절(HVAC)
* 건물 관리 시스템(BMS)
* 환기 조절 시스템(DCV)
* 차량 내 공기 질
* 무선 장비를 이용한 IoT 및 Smart Technology
* 실내 공기 질(IAQ)
* 계측
* 농업
* 항공우주
## 4. 사양
| 항목 | 내용 |
| ---------- | ---------------------------------------------------------------------------------------------- |
| 측정 범위 |
|
| 센서 내부 | Solid-State, 가열된 필라멘트 없음 |
| 통신 방식 | UART 또는 I²C |
| 전원 전압 | 3.25-5.5V |
| 소모 전류 |
측정 모드: 15mA 절전 모드: 0.01mA
|
| 응답 시간 | 30.5ms |
| 동작 온도 | 0\~50℃ |
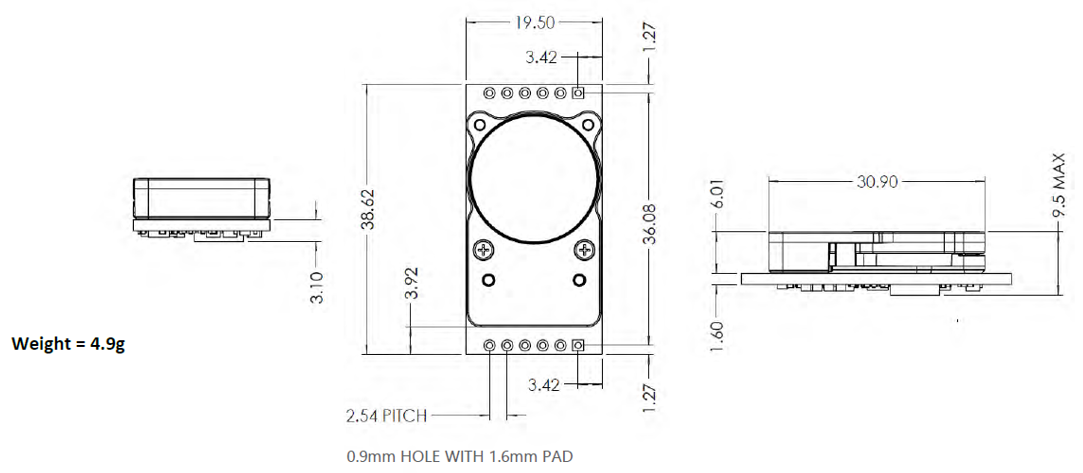
| 센서 치수 및 무게 | L x W x H(31mm x 19.5mm x 8.7mm), Weight(2.5g) |
| 센서 내구성 | 진동 및 충격에 강하고 비가열성 |
| 센서 교정 | 자동 영점교정 기능 내장 |
| 센서 수명 | 15년 |
| 헤더 핀 크기 | 2.54mm |
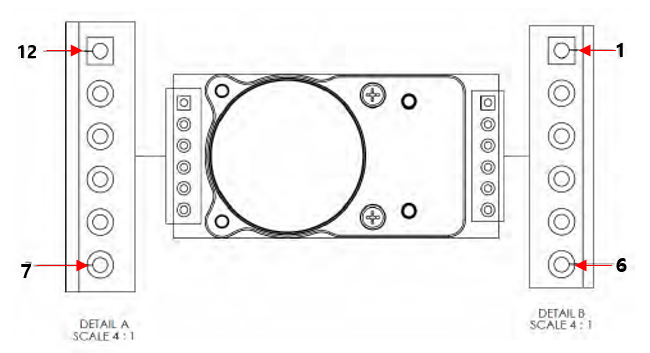
## 5. 제품 크기 및 핀 특성
| PIN | NAME | Function |
| --- | ----------- | ------------------------ |
| 1 | GND | VSS |
| 2 | VDD | Positive Supply |
| 5 | ALARM | ALARM Output |
| 7 | PWM\_RS485 | PWM or RS485 transceiver |
| 8 | I2C\_ENABLE | Digital Input |
| 9 | I2C\_SCL | I2C clock |
| 10 | I2C\_SDA | I2C data |
| 11 | Tx\_out | Digital Input |
| 12 | Rx\_ In | Digital Output |
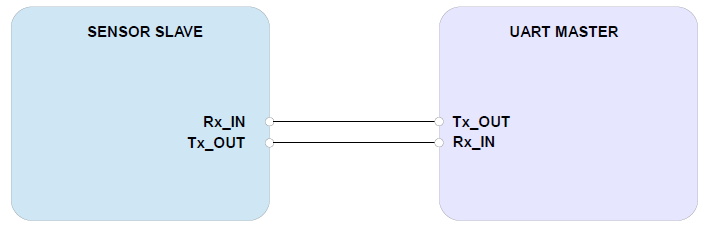
## 6. 디바이스 연결 방법
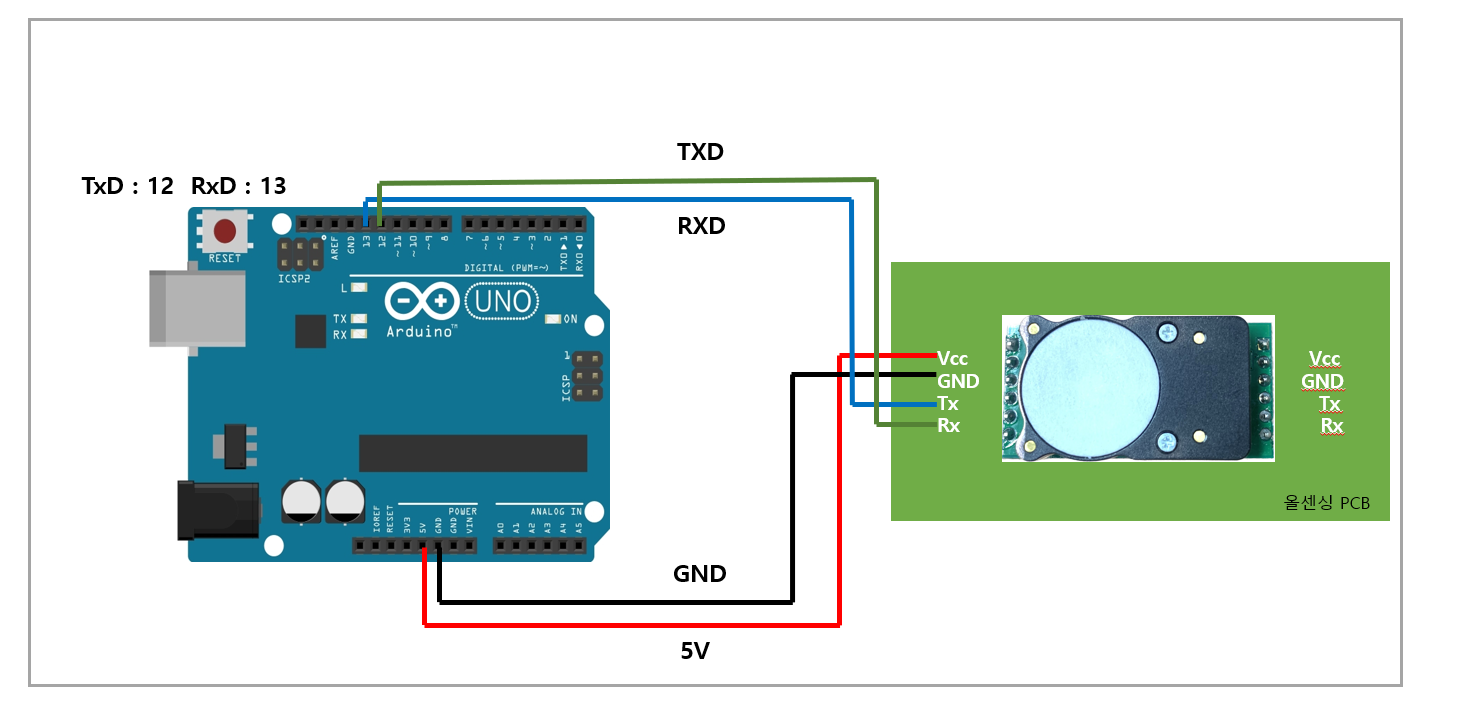
### Connection DIAGRAM (UART)
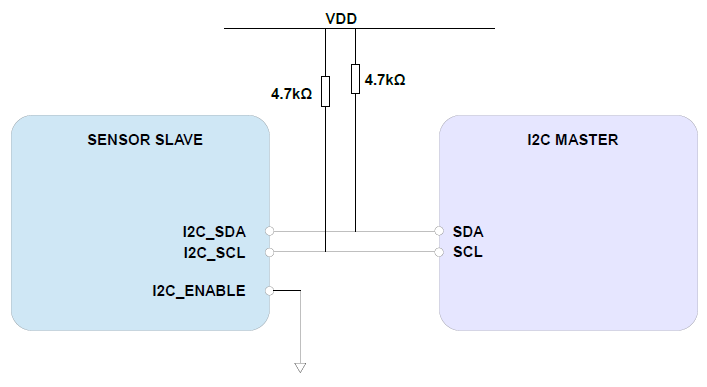
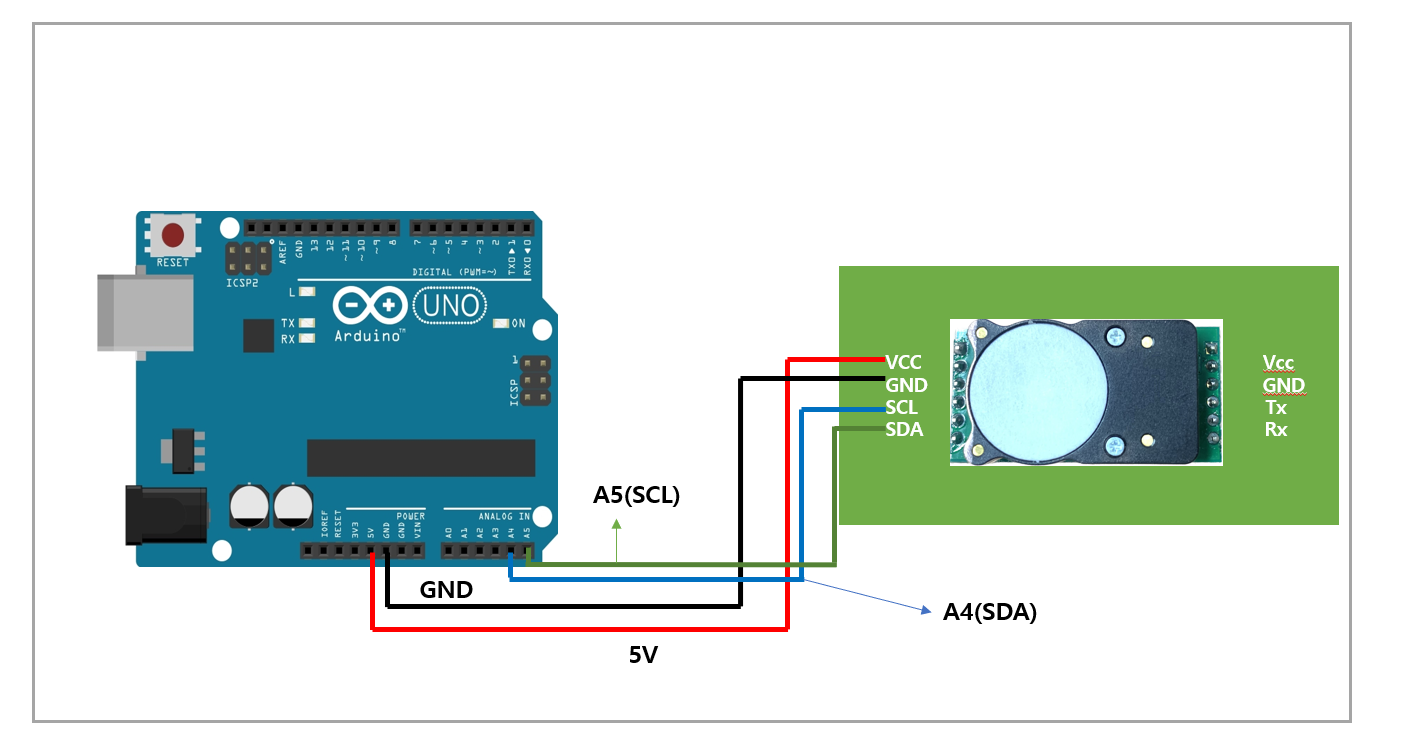
### Connection DIAGRAM (I2C)
Arduino Uno UART
Arduino Uno I2C
## 7. 통신 프로토콜
* 통신 환경
| PARAMETER | TYP | UNIT |
| :-------------------: | :--: | :----: |
| Buad Rate | 9600 | Bits/s |
| Data Bits | 8 | |
| Parity | None | |
| Stop Bits | 1 | |
| Hardware Flow Control | None | |
* UART Command
| Command | Description | Response |
| ---------------------------- | ------------------------------------------- | ------------------------------------------- |
| K 0 | Command를 기다리는 상태, 측정 X | K 00000 |
| K 1 | 연속적으로 값을 측정 | K 00001 |
| K 2 | 센서 값 요청시에만 응답 | K 00002 |
| Z | 가장 최근에 측정한 CO2 필터 된 값 | Z 00521 |
| z | 가장 최근에 측정한 CO2 필터 되지 않은 값 | z 00521 |
| A ### | CO2 필터 값 설정 | A 00016 |
| a | CO2 필터 값 확인 | a 00016 |
| U | 질소를 사용하여 제로 교정 | U 33000 |
| u | 초기 설정 값으로 제로 교정 | u |
| G | Fresh Air를 사용하여 제로 교정 | G 33000 |
| X ##### | 현재 값으로 스팬 교정 | X 11000 |
|
P 10###
P 11###
| Fresh Air에서 사용할 대기 중 농도를 설정(default 400ppm) | Fresh Air에서 사용할 대기 중 농도를 설정(default 400ppm) |
| S ### | 고도 설정 | S 08192 |
| s | 고도 설정 값 확인 | s 08192 |
| M ### | 측정 데이터 문자열로 전송 | M 6 |
### 모드 설정 및 CO2 값 읽기
> 모드
#### 1. COMMAND 모드
\- COMMAND를 기다리는 상태, 측정 X
#### 2. Streaming 모드(default)
\- 연속적으로 값을 측정함(초당 2회 측정), 측정 외 다른 Command시 100ms delay가 필요함
#### 3. Polling 모드
\- 센서 값 요청 시에만 응답, 센서 값 요청하지 않을 때에는 백그라운드에서 계속 측정을 수행함
| Mode | Command | Description | Response |
| --------- | ------- | --------------- | -------- |
| Command | K 0 | 명령어 기다리는 상태 | K 00000 |
| Streaming | K 1 | 연속적으로 값 측정 | K 00001 |
| Polling | K 2 | 센서 값 요청 시 에만 응답 | K 00002 |
#### 소스 코드
* Streaming mode에서 CO2 값 읽기
```cpp
#include
SoftwareSerial mySerial(12, 13); //Uno Rx Tx (12 13) = SoftwareSerial
const char* Polling_mode = "K 2\r\n";
const char* Stream_mode = "K 1\r\n";
const char* Standby_mode = "K 0\r\n";
bool tx_ready;
bool rx_ready;
String str;
void setup() {
Serial.begin(9600); //시리얼 통신 초기화
mySerial.begin(9600);
while(!mySerial){} //시리얼 통신 포트가 연결되기 전까지 대기
delay(14); // power on data ready
mySerial.print(Stream_mode); //Polling 모드로 변경
mySerial.print("Z\r\n"); //CO2값 읽기 명령
}
void loop()
{
if(rx_ready == 0) // overflow 처리
{
delay(31); // Measurement data ready
if(mySerial.available()>0) //수신받은 데이터가 0 초과, 즉 데이터가 존재한다면
{ //버퍼에서 읽어드린 char의 데이터를 String 형태로 반환
str = "";
str = mySerial.readStringUntil('\n');
Serial.println(str);
rx_ready = 1;
tx_ready = 1;
}
}
else if(tx_ready == 1)
{
mySerial.print("Z\r\n"); //CO2값 읽기 명령
tx_ready = 0;
rx_ready = 0;
}
}
```
+시리얼 모니터
* Polling mode에서 CO2값 읽기
```cpp
#include
SoftwareSerial mySerial(12, 13); //Uno Rx Tx (12 13) = SoftwareSerial
const char* Polling_mode = "K 2\r\n";
const char* Stream_mode = "K 1\r\n";
const char* Standby_mode = "K 0\r\n";
String str;
void setup() {
Serial.begin(9600); //시리얼 통신 초기화
mySerial.begin(9600);
while(!mySerial){} //시리얼 통신 포트가 연결되기 전까지 대기
delay(14); // power on data ready
mySerial.print(Polling_mode); //Polling 모드로 변경
}
void loop()
{
if(Serial.read() == 'R')
{
mySerial.print("Z\r\n"); //CO2값 읽기 명령
}
if(mySerial.available()>0) //수신받은 데이터가 0 초과, 즉 데이터가 존재한다면
{ //버퍼에서 읽어드린 char의 데이터를 String 형태로 반환
str = "";
str = mySerial.readStringUntil('\n');
Serial.println(str);
}
}
```
* 시리얼 모니터
* 시리얼 모니터에 'R' 입력 후 엔터
* 응답
### 인터페이스 유형별(UART,I2C) CO2값 읽기
* I2C
```cpp
#include
#define Slave_adddress 0x41
#define CO2_READ_command 0x34
#define CO2_READ_and_test_command 0x02
void setup() {
Wire.begin();
Serial.begin(9600);
}
void loop() {
int CO2_value = 0;
Wire.beginTransmission(Slave_adddress); // transmit to slave address
Wire.write(CO2_READ_and_test_command); // transmit to register address
Wire.endTransmission(); // stop transmitting
Wire.requestFrom(Slave_adddress, 3); //from slave request 2byte
while ( Wire.available()) {
int CO2_high_value = Wire.read();
int CO2_low_value = Wire.read();
/* CO2_Self_test value = 85(DEC) : Sensor is nominal ,
CO2_Self_test value = 170(DEC): Sensor error */
int CO2_self_test = Wire.read();
CO2_high_value = CO2_high_value <<8;
CO2_value = CO2_high_value + CO2_low_value;
Serial.print("CO2_value : ");
Serial.print(CO2_value); //reading CO2 value
Serial.println(" PPM ");
}
delay(1000);
}
```
* UART
```cpp
#include
SoftwareSerial mySerial(12, 13); //Uno Rx Tx (12 13) = SoftwareSerial
const char* Polling_mode = "K 2\r\n";
const char* Stream_mode = "K 1\r\n";
const char* Standby_mode = "K 0\r\n";
bool tx_ready;
bool rx_ready;
String str;
void setup() {
Serial.begin(9600); //시리얼 통신 초기화
mySerial.begin(9600);
while(!mySerial){} //시리얼 통신 포트가 연결되기 전까지 대기
delay(14); // power on data ready
mySerial.print(Stream_mode); //Polling 모드로 변경
mySerial.print("Z\r\n"); //CO2값 읽기 명령
}
void loop()
{
if(rx_ready == 0) // overflow 처리
{
delay(31); // Measurement data ready
if(mySerial.available()>0) //수신받은 데이터가 0 초과, 즉 데이터가 존재한다면
{ //버퍼에서 읽어드린 char의 데이터를 String 형태로 반환
str = "";
str = mySerial.readStringUntil('\n');
Serial.println(str);
rx_ready = 1;
tx_ready = 1;
}
}
else if(tx_ready == 1)
{
mySerial.print("Z\r\n"); //CO2값 읽기 명령
tx_ready = 0;
rx_ready = 0;
}
}
```
**Serial Monitor**
* I2C
* UART
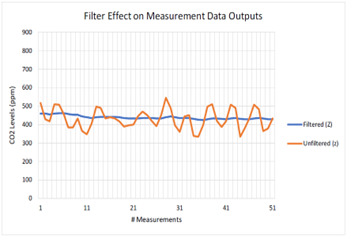
### Digital filter
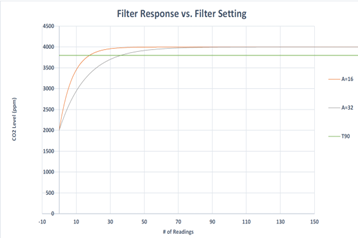
* 필터(Filtered)된 값과 필터 되지 않은(Unfiltered) CO2 값의 차이는 아래 그림과 같음
* 필터된(Filtered) CO2 값은 노이즈를 제거하여 더 정확한 값을 제공함
Digital filter 설정
* 필터 설정 범위: 1\~255( 1= Unfiltered)
* 필터의 설정 값이 증가하면 측정 출력 응답 시간이 늘어남
* A=필터 설정 값
* A = 32 가 A = 16(default) 보다 T90에 도달하는 시간이 늘어남
Digital filter Command
| Command | Description | Example | Response |
| ------- | ----------- | ------- | -------- |
| A ### | CO2 필터 값 설정 | A 16 | A 00016 |
| a | CO2 필터 값 확인 | a | a 00016 |
## 소스코드
* CO2 필터 값 확인
```cpp
#include
SoftwareSerial mySerial(12, 13); //Uno Rx Tx (12 13) = SoftwareSerial
const char* Polling_mode = "K 2\r\n";
const char* Stream_mode = "K 1\r\n";
const char* Standby_mode = "K 0\r\n";
bool tx_ready;
bool rx_ready;
String str;
void setup() {
Serial.begin(9600); //시리얼 통신 초기화
mySerial.begin(9600);
while(!mySerial){} //시리얼 통신 포트가 연결되기 전까지 대기
delay(14); // power on data ready
mySerial.print(Stream_mode); //Polling 모드로 변경
}
void loop()
{
if(rx_ready == 0) // overflow 처리
{
delay(31); // Measurement data ready
if(mySerial.available()>0) //수신받은 데이터가 0 초과, 즉 데이터가 존재한다면
{ //버퍼에서 읽어드린 char의 데이터를 String 형태로 반환
str = "";
str = mySerial.readStringUntil('\n');
Serial.println(str);
rx_ready = 1;
tx_ready = 1;
}
}
else if(tx_ready == 1)
{
mySerial.print("a\r\n"); //현재 설정된 필터 값 읽기 명령어
tx_ready = 0;
rx_ready = 0;
}
}++
```
* 시리얼 모니터
* CO2 필터 값 설정
```cpp
#include
SoftwareSerial mySerial(12, 13); //Uno Rx Tx (12 13) = SoftwareSerial
const char* Polling_mode = "K 2\r\n";
const char* Stream_mode = "K 1\r\n";
const char* Standby_mode = "K 0\r\n";
bool tx_ready;
bool rx_ready;
String str;
void setup() {
Serial.begin(9600); //시리얼 통신 초기화
mySerial.begin(9600);
while(!mySerial){} //시리얼 통신 포트가 연결되기 전까지 대기
delay(14); // power on data ready
mySerial.print(Stream_mode); //Polling 모드로 변경
}
void loop()
{
if(rx_ready == 0) // overflow 처리
{
delay(31); // Measurement data ready
if(mySerial.available()>0) //수신받은 데이터가 0 초과, 즉 데이터가 존재한다면
{ //버퍼에서 읽어드린 char의 데이터를 String 형태로 반환
str = "";
str = mySerial.readStringUntil('\n');
Serial.println(str);
rx_ready = 1;
tx_ready = 1;
}
}
else if(tx_ready == 1)
{
mySerial.print("A 32\r\n"); //필터 값 변경 명령어
tx_ready = 0;
rx_ready = 0;
}
}
```
* 시리얼 모니터